/*
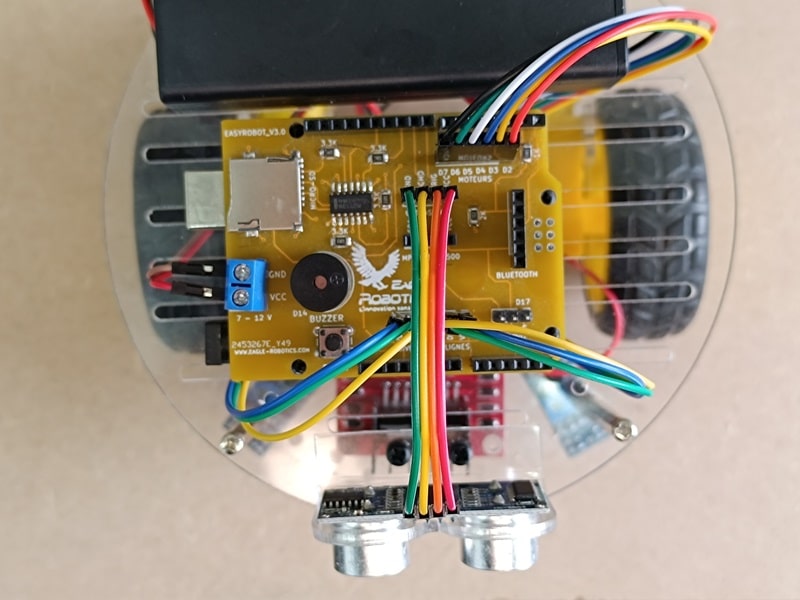
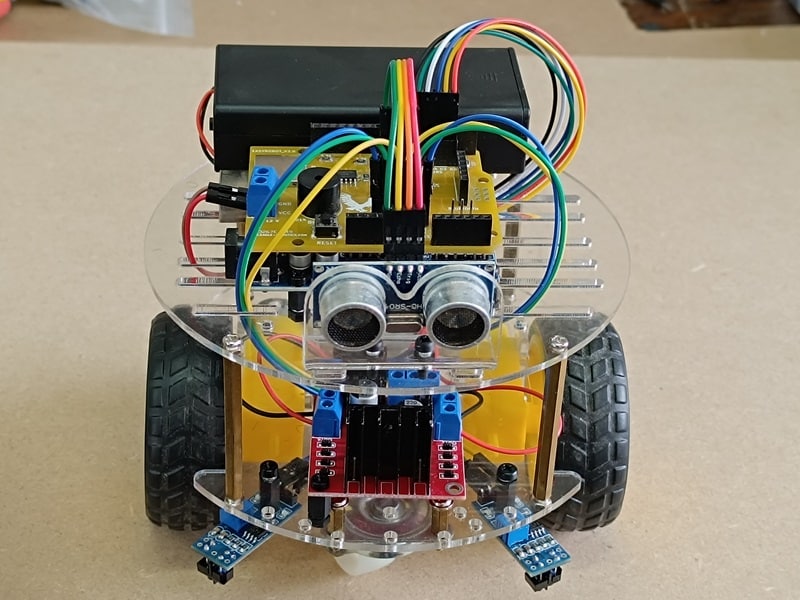
* EASY ROBOT V3.0 - MODE ÉVITEMENT D'OBSTACLES
* ATELIER DE LA ROBOTIQUE ® 2024
* Auteur: Christian Joseph
* Help: Contact@atelierdelarobotique.fr
* Site: www.atelierdelarobotique.fr
*/
// Broches de contrôle Moteur 1
int enableA = 3;//ENA
int pinA1 = 4;//IN1
int pinA2 = 2;//IN2
// Broches de contrôle Moteur 2
int enableB = 5;//ENB
int pinB1 = 6; //IN3
int pinB2 = 7;//IN4
//Broche du capteur à Ultrasons
#define trigPin 8
#define echoPin 9
int duration, cm, cm2, b;
void setup() {
// Configuration des broches de contrôle des moteurs
pinMode (enableA, OUTPUT);
pinMode (pinA1, OUTPUT);
pinMode (pinA2, OUTPUT);
pinMode (enableB, OUTPUT);
pinMode (pinB1, OUTPUT);
pinMode (pinB2, OUTPUT);
//Configuration des broches du capteur à Ultrasons
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);//Initialisation liaison série
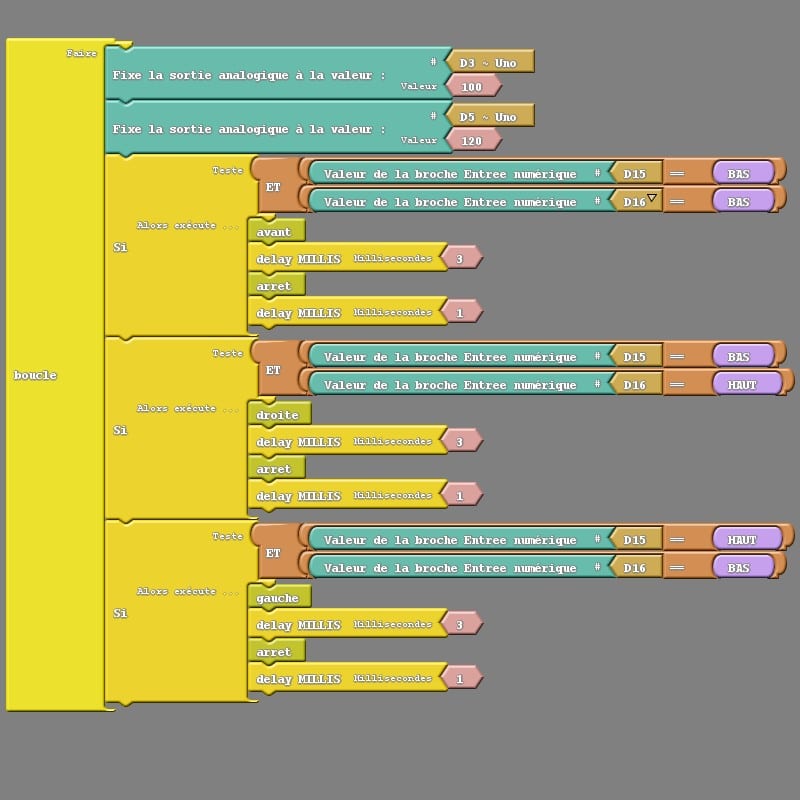
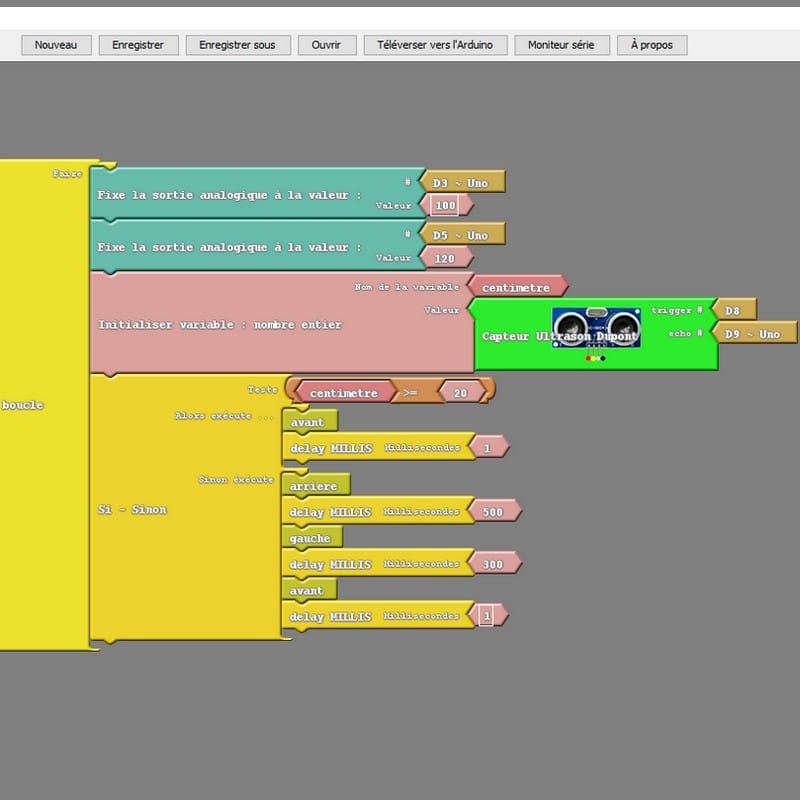
analogWrite (enableA, 100);//Activation moteur 1 - Ajuster si besoin entre 0 et 255
analogWrite (enableB, 120);//Activation moteur 2 - Ajuster si besoin entre 0 et 255
}
void loop() {
distance();//Mesure de la distance en centimètres
//Si la distance mesurée est supérieure ou égale à 20 cm, alors le robot va tout droit
if (cm >= 20){
avant(1);
}
/*Si la distance mesurée est inférieure à 20 cm, alors le robot recule, tourne à gauche
et il repart tout droit */
else if (cm < 20){
arriere(500);
gauche(300);
avant(1);
}
}
// Mesures des distances
void distance() {
digitalWrite(trigPin, HIGH);
delayMicroseconds(1000);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
cm = (duration/2) / 29.1;
Serial.println(cm); //Affichage de la distance mesurée en cm
}
// Fonctions des moteurs
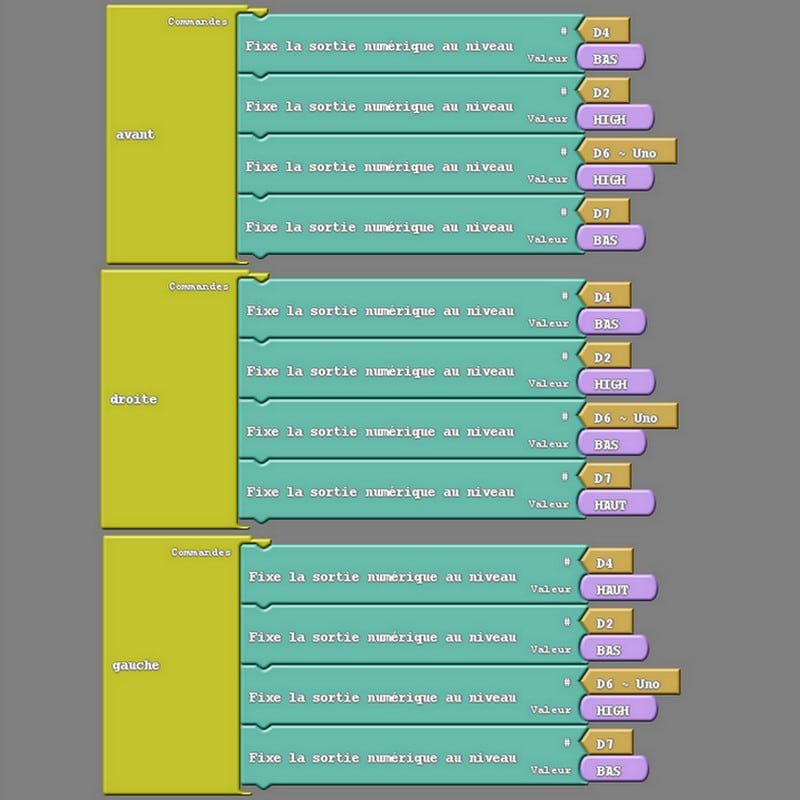
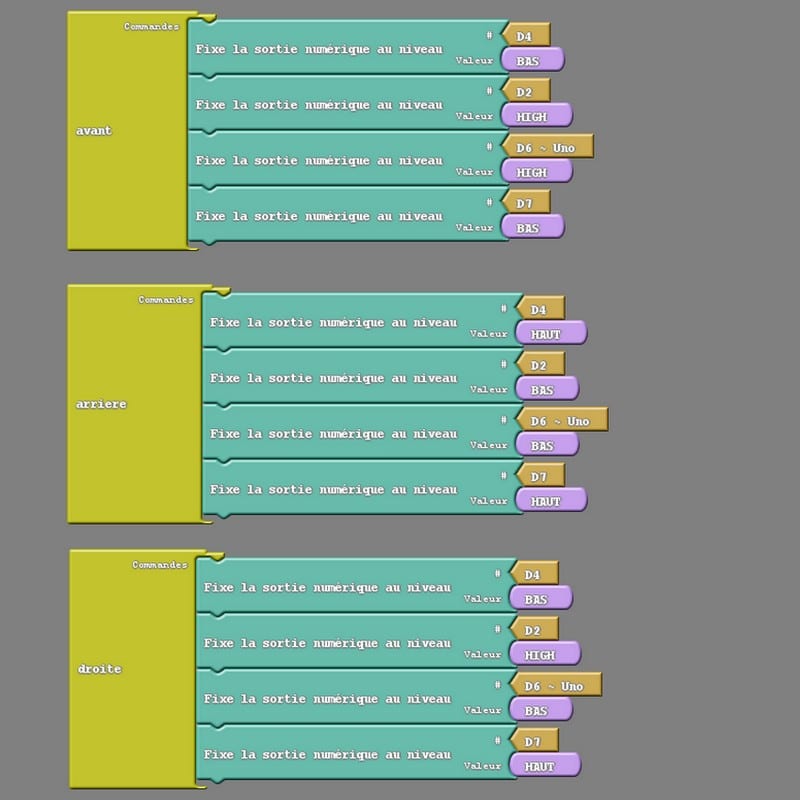
void avant (int duration) {
digitalWrite (pinA1, LOW);
digitalWrite (pinA2, HIGH);
digitalWrite (pinB1, HIGH);
digitalWrite (pinB2, LOW);
delay (duration);
}
void arriere (int duration) {
digitalWrite (pinA1, HIGH);
digitalWrite (pinA2, LOW);
digitalWrite (pinB1, LOW);
digitalWrite (pinB2, HIGH);
delay (duration);
}
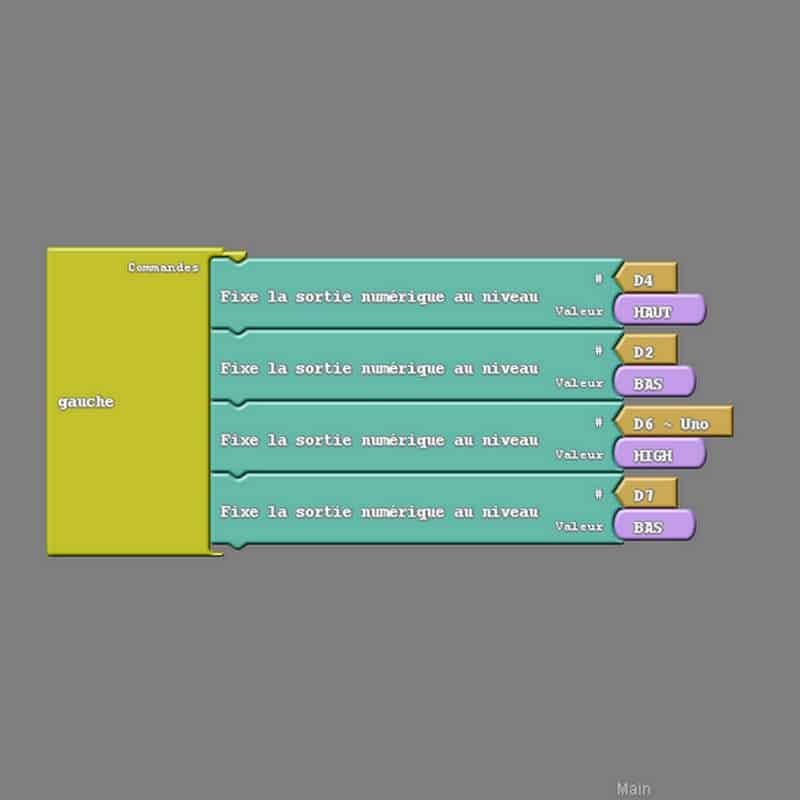
void gauche (int duration) {
digitalWrite (pinA1, HIGH);
digitalWrite (pinA2, LOW);
digitalWrite (pinB1, HIGH);
digitalWrite (pinB2, LOW);
delay (duration);
}
void droite (int duration) {
digitalWrite (pinA1, LOW);
digitalWrite (pinA2, HIGH);
digitalWrite (pinB1, LOW);
digitalWrite (pinB2, HIGH);
delay (duration);
}
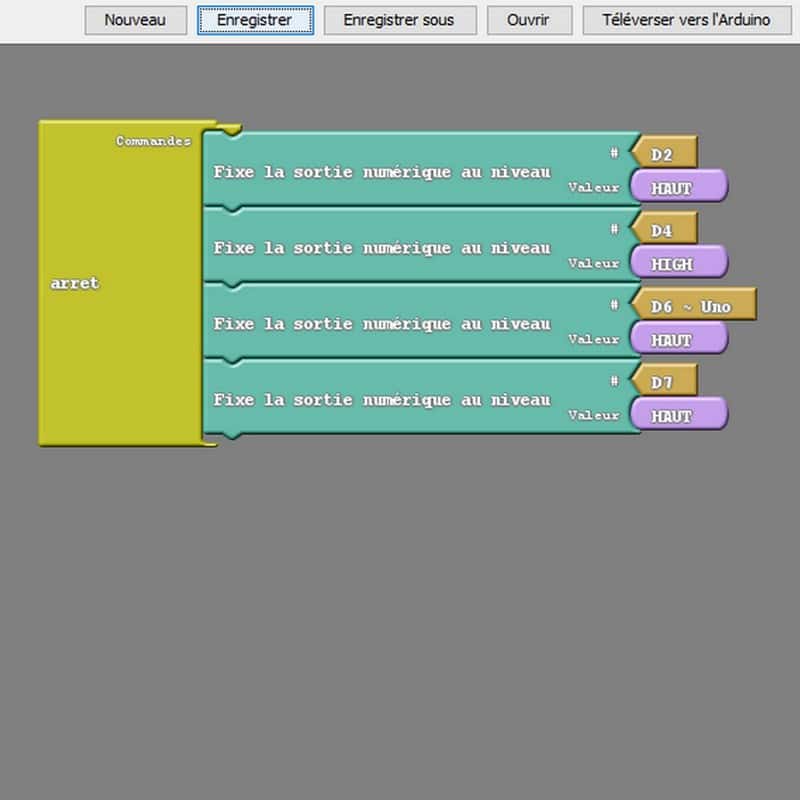
void robotStop (int duration) {
digitalWrite (pinA1, HIGH);
digitalWrite (pinA2, HIGH);
digitalWrite (pinB1, HIGH);
digitalWrite (pinB2, HIGH);
delay (duration);
}